







Металлоискатель по принципу частотомера
Практическая конструкция металлоискателя
Очевидно, что если реализовывать такое устройство на элементах средней степени интеграции, то получится сравнительно сложный и громоздкий прибор, что для мобильного исполнения нежелательно. Выходом из этой ситуации стало применение микроконтроллера. На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
Это 8-битный экономичный RISC микроконтроллер. Имеет на частоте 10 MHz производительность 10 MIPS. Содержит: 2 кБ флэш памяти, 128 байт EEPROM, 15 линий ввода/вывода, 32 рабочих регистра, два таймера/счетчика, сторожевой таймер, аналоговый компаратор, универсальный последовательный порт.
Основные технические характеристики металлоискателя
|
Напряжение питания |
5,5-20 В |
|
Потребляемый ток |
15 мА |
|
Индикация |
световая - 7 светодиодов и звуковая |
|
Режимы поиска |
статический и динамический |
|
Дискриминация |
ферромагнетики/неферромагнетики |
|
Глубина обнаружения (на воздухе): |
|
|
Монета диаметром |
|
|
"Пистолет" |
|
|
"Каска" |
|
Принципиальная схема
Принципиальная схема металлоискателя по принципу частотомера изображена рис.5.
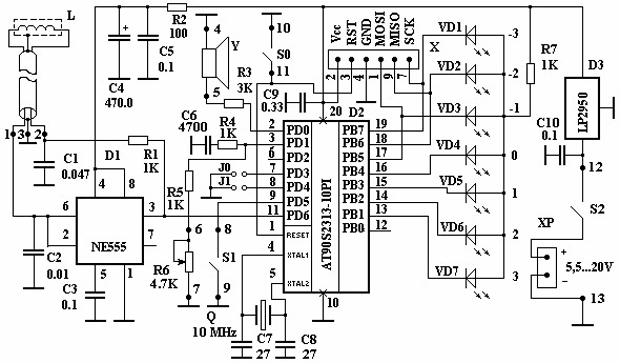
Рисунок 5. Принципиальная электрическая схема металлоискателя
Измерительный генератор построен на таймере D1 NE555. Она используется в несколько необычном включении - в качестве LC генератора. Колебательный контур генератора состоит из конденсаторов C1,C2 и катушки индуктивности датчика. Резонансная частота контура определяется как
где C - это последовательное соединение конденсаторов C1 и C2. Так как
микроконтроллер автоматически подстраивается под частоту измерительного
генератора, в схеме не предусмотрена подстройка частоты генератора. При
использовании датчика диаметром
На микроконтроллер D2 возложены все остальные функции по обработке сигнала измерительного
генератора вплоть до индикации. В данной схеме применен микроконтроллер
AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+
Динамический режим предназначен для поиска мишеней в сложных условиях, на фоне помех от грунта, минералов и т.д. В динамическом режиме сигнал подвергается цифровой фильтрации, которая выделяет полезный сигнал на фоне мешающих сигналов. В своем приборе мы применили оптимальную согласованную фильтрацию. Вкратце ее суть заключается в том, что для любого сигнала существует оптимальный фильтр, позволяющий получить максимальный отклик на выходе фильтра. Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
При помощи переменного резистора R6 регулируется чувствительность прибора. Светодиоды VD1…VD3 индицируют уровень отклонения частоты измерительного генератора в случае преобладания ферромагнитного эффекта. Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Схема содержит рекордно низкое количество деталей. При этом к ним не
выдвигается особых требований. Микросхему AT90S2313-10PI можно заменить на
AT90S2313-10PC, однако, в этом случае не гарантируется работа при температуре
меньше
Микросхему D1 можно попробовать заменить на КР1006ВИ1. Светодиоды желательно выбирать с повышенной яркостью свечения. Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже - 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Конденсаторы C1 и C2 – должны иметь минимальный ТКЕ, особенно C2. К остальным конденсаторам не предъявляется особых требований.
Наушник Y (или наушники) можно взять от плеера. Возможно потребуется подобрать номинал резистора R3 для получения приемлемой громкости. В крайнем случае, наушник можно заменить на пьезоизлучатель.
Конструкция корпуса прибора может быть достаточно произвольной.
Внешний вид металлоискателя, можно посмотреть на рис. 6.
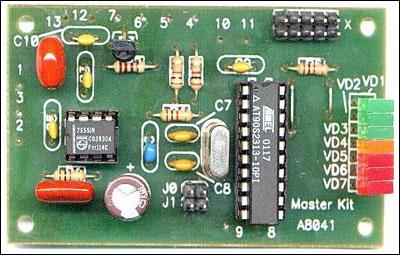
Рисунок 6. Внешний вид металлоискателя
Особо следует остановиться на конструкции поисковой катушки - она может быть реализована различными способами. Основные требования к ней - жесткость конструкции, герметичность и наличие электростатического экрана. Можно предложить следующую технологию изготовления катушки:
Берется доска подходящего размера и на ней рисуется окружность диаметром

Рисунок 7. Обмотка катушки липкой лентой
Аналогичным образом поверх слоя из липкой ленты наносится слой из
алюминиевой фольги, служащий экраном обмотки датчика. Для этого фольга нарезается
на полосы шириной около
Расположение элементов на печатной плате и рисунок печатной платы (М1:1) приведены на рис.8 и рис.9.
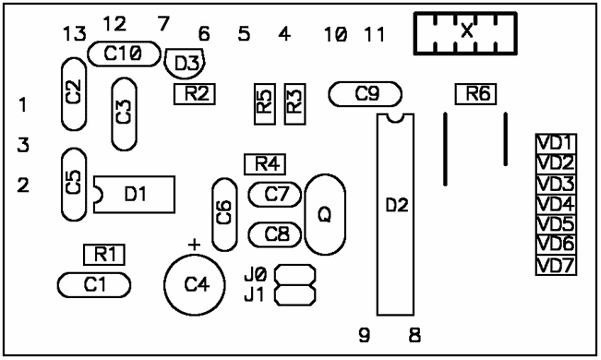
Рисунок 8. Расположение элементов на печатной плате.
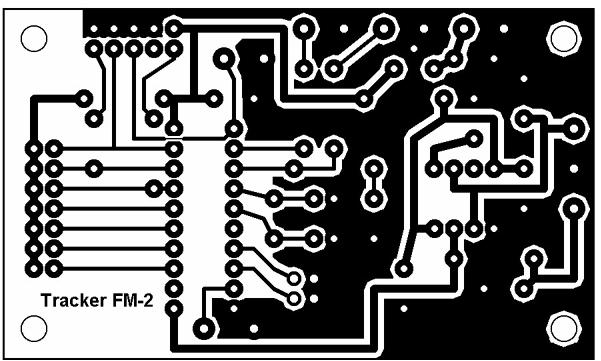
Рисунок 9. Вид печатной платы
Настройка прибора
Можно предложить следующий порядок настройки прибора.
- Проверить правильность монтажа схемы и подать питание.
- Измерить потребляемый ток. Он должен быть не более 15 мА.
- Убедиться, что на выводе 3 микросхемы D1 присутствует меандр расчетной частоты (около 20 кГц для указанных выше номиналов конденсаторов C1 и C2 и стандартного датчика)
- Удалить рамку прибора подальше от металлических предметов и нажать кнопку S0 «Сброс».
- Убедиться в работоспособности органов индикации, поднося к датчику различные металлические предметы.
Работа с прибором
Если переключатель S1 замкнут, то прибор переходит в статический режим. В этом режиме при приближении катушки к ферромагнитной мишени начинают последовательно загораться светодиоды VD3, VD2, VD1. Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта - эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
При размыкании переключателя S1 прибор переходит в динамический режим. В этом режиме катушка должна перемещаться над грунтом со скоростью примерно 0.5-1 м/с. Местонахождение объекта в динамическом режиме находится методом "артиллерийской вилки" при проведении катушки над объектом дважды - слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке. Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из "шкалы" VD5, VD6, VD7, а затем из "шкалы" VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Как уже было указано выше, каждому светодиоду соответствует свой тон звуковой индикации. После непродолжительной работы с металлоискателем запоминаются "напевы", характерные для разных типов мишеней. Это позволяет при поисках пользоваться преимущественно звуковой индикацией, что довольно удобно.
Перед началом работы в обоих режимах необходимо выставить оптимальную чувствительность прибора с помощью переменного резистора R6. Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
При прочих равных условиях динамический режим за счет фильтрации позволяет достичь лучшей чувствительности по сравнению со статическим режимом. Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Во время полевых испытаний металлоискатель показал неплохие результаты
Hex-код прошивки контроллера металлоискателя.
Радиохобби 2002`01

